ใบงานที่ 8 Ultrasonic Object Radar System

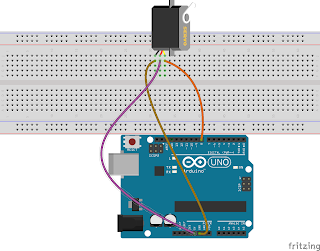
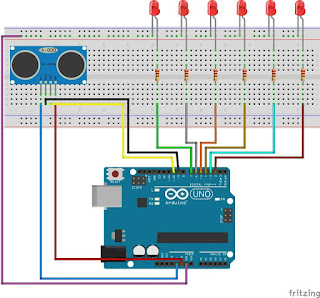
ผู้จัดทำ 1.นาย รุจ พรชัยประสิทธิ์ 1 สทค 1 6031280017 2.นาย ธีรพงษ์ เฉลยพงษ์ 1 สทค 2 6031280034 อุปกรณ์ที่ใช้ 1. บอร์ด Arduino 2. สาย USB 3. Servo SG90 4. สายไฟ 3 เส้น รูปวงจร CODE #Arduino // Includes the Servo library #include <Servo.h>. // Defines Tirg and Echo pins of the Ultrasonic Sensor const int trigPin = 10; const int echoPin = 11; // Variables for the duration and the distance long duration; int distance; Servo myServo; // Creates a servo object for controlling the servo motor void setup() { pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output pinMode(echoPin, INPUT); // Sets the echoPin as an Input Serial.begin(9600); myServo.attach(12); // Defines on which pin is the servo motor attached } void loop() { // rotates the servo motor from 15 to 165 degrees for(int i=15;i<=165;i++){ myServo.write(i); delay(30); distance = calculateDistance();// Calls a function for calculating the distance measur...