๊็็ใบงานที่ 6 การควบคุม Servo Motor (SG90) ด้วย Arduino UNO R3
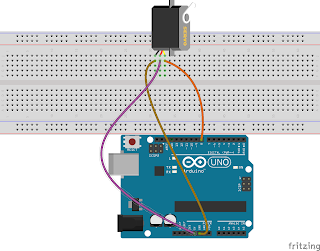
ผู้จัดทำ 1.นาย รุจ พรชัยประสิทธิ์ 1 สทค 1 6031280017 2.นาย ธีรพงษ์ เฉลยพงษ์ 1 สทค 2 6031280034 อุปกรณ์ที่ใช้ 1. บอร์ด Arduino 2. สาย USB 3. Servo SG90 4. สายไฟ 3 เส้น รูปวงจร CODE #Code 0-180 องศา #include <Servo.h> Servo servo; int angle = 10; void setup() { servo.attach(8); servo.write(angle); } void loop() { // scan from 0 to 180 degrees for(angle = 10; angle < 180; angle++) { servo.write(angle); delay(15); } // now scan back from 180 to 0 degrees for(angle = 180; angle > 10; angle--) { servo.write(angle); delay(15); } } VDO คำอธิบาย Servo ทำหน้าที่หมุดจาก ซ้าย-ขวา 180 องศา แล้วกลับ ขวา-ซ้าย 0 องศา และหมุดวนไปเรื่อยๆ CODE # Code 45-135 องศา #include <Servo.h> Servo servo; i...